Lab 8 - Stunts!
Posted on 2026-04-09
Task B: Drift
I chose the drift stunt. The car drives fast toward a wall, initiates a 180 degree turn when it gets close, then drives back.
Approach
I built a state machine on the Artemis with 5 states: APPROACH, BRAKE, DRIFT, RETURN, DONE. All parameters are sent over BLE so I could tune without re-uploading.
- APPROACH: Drive forward at set L/R motor PWM values. The front ToF sensor polls for distance. When a real ToF reading drops below the threshold, transition to BRAKE.
- BRAKE: Short reverse burst to kill forward momentum before turning.
- DRIFT: Yaw PD controller (reused from Lab 6) turns the car toward the 180 degree target using DMP yaw tracking.
- RETURN: Drive forward for a set duration.
switch (stunt_state) {
case 0: // APPROACH
analogWrite(LEFT_FWD, stunt_approach_left);
analogWrite(RIGHT_FWD, stunt_approach_right);
if (tof_new_data && tof_current > 0 && tof_current < stunt_distance_threshold) {
stunt_state = 1; // BRAKE
}
break;
case 1: // BRAKE
drive(-stunt_brake_pwm, -stunt_brake_pwm);
if (millis() - stunt_state_time > stunt_brake_duration) {
stunt_state = 2; // DRIFT
yaw_setpoint = stunt_turn_angle;
current_yaw = 0.0;
}
break;
case 2: // DRIFT
if (dmp_data_ready) {
stunt_motor = compute_yaw_pid(gyrZ);
// direct analogWrite for turning
if (abs(yaw_err) < stunt_turn_margin)
stunt_state = 3; // RETURN
}
break;
case 3: // RETURN
analogWrite(LEFT_FWD, stunt_return_left);
analogWrite(RIGHT_FWD, stunt_return_right);
if (millis() - stunt_state_time > stunt_return_duration)
stunt_state = 4; // DONE
break;
}
Tuning and Debugging
The biggest challenge was getting the car to not hit the wall. I ran into a few issues during tuning:
Motor calibration clipping: My left motor is much weaker than the right. The drive() function multiplies the left PWM by a calibration factor (3.5), but at any approach speed above ~72 PWM both motors clip at 255 and the calibration does nothing. I switched to setting left and right motor PWM independently via BLE, bypassing the calibration entirely.
ToF extrapolation false triggers: The distance estimate between sensor readings sometimes spiked wildly, triggering the brake too early. I changed the trigger to only fire on actual ToF readings (tof_new_data && tof_current < threshold), not the extrapolated estimate.
Brake state: At full approach speed the car had too much momentum to turn in time. I added a short reverse burst (200 PWM for 150ms) between approach and drift to kill the forward momentum before starting the turn.
Yaw PD tuning: Reused gains from Lab 6 (Kp=3.0, Kd=1.0) but the turn was too slow at 3.4 seconds. Bumped Kp to 4.0 and yaw_max_pwm from 150 to 255, which brought the 180 turn down to ~0.6 seconds.
Final parameters:
| Parameter | Value |
|---|---|
| Approach L/R | 255 / 70 PWM |
| Distance threshold | 500mm |
| Brake | 200 PWM, 150ms |
| Yaw Kp / Kd | 4.0 / 1.0 |
| Yaw max PWM | 255 |
| Return L/R | 255 / 70 PWM |
| Return duration | 1000ms |
Results
Here are 3 successful drift runs:
Trial 1
Open video if it doesn't play above.
Trial 2
Open video if it doesn't play above.
Trial 3
Open video if it doesn't play above.
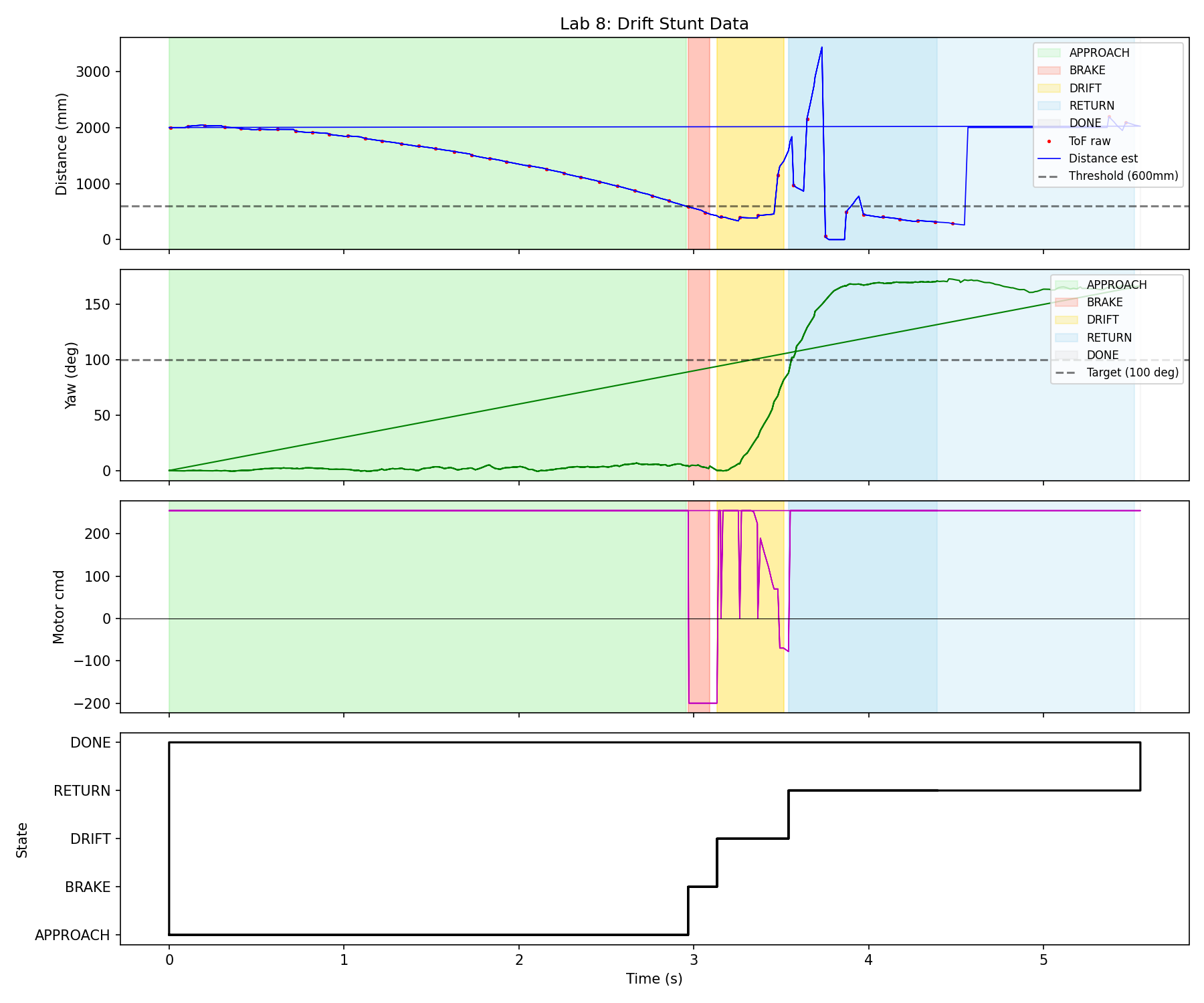
Sensor Data
Here’s the 4-panel plot from one of the successful runs showing ToF distance, yaw angle, motor commands, and state transitions over time.