Lab 6 - Orientation Control
Posted on 2026-03-18
Prelab: BLE Setup
I added BLE commands to tune and run the yaw PID. Like last lab, I have separate gains, setpoint, duration, and calibration for orientation control.
ble.send_command(CMD.SET_YAW_GAINS, f"{KP}|{KD}")
ble.send_command(CMD.SET_YAW_SETPOINT, "90")
ble.send_command(CMD.SET_YAW_DURATION, "5000")
ble.send_command(CMD.START_YAW_PID, "")
time.sleep(6)
collected_data.clear()
ble.send_command(CMD.SEND_YAW_PID_DATA, "")
The controller logs timestamp, yaw angle, setpoint, and motor command at the DMP update rate (~56 Hz). I pull it back over BLE and plot in Jupyter.
PID Input Signal
I used the ICM-20948’s DMP (Digital Motion Processor) for yaw instead of integrating the raw gyroscope. This avoids the drift problem that comes with manually integrating gyro readings over time.
I had to enable DMP by uncommenting #define ICM_20948_USE_DMP in the SparkFun library header. Setup in the Arduino sketch:
myICM.initializeDMP();
myICM.enableDMPSensor(INV_ICM20948_SENSOR_GAME_ROTATION_VECTOR);
myICM.setDMPODRrate(DMP_ODR_Reg_Quat6, 0); // max rate
myICM.enableFIFO();
myICM.enableDMP();
myICM.resetDMP();
myICM.resetFIFO();
Here I rotated the robot in a full circle by hand with the PID off. I ran this test twice and the second time it didn’t reset, so the yaw starts around 280 degrees. But you can see it tracks the hand rotation smoothly.
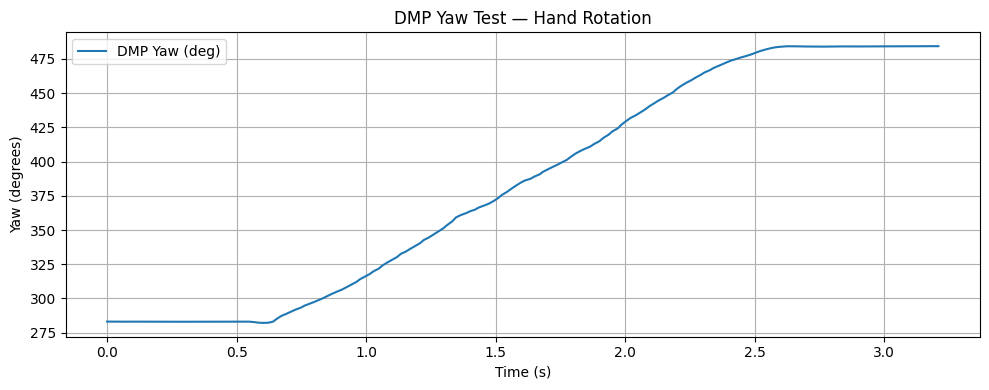
DMP yaw during a hand rotation test. No PID, just verifying the sensor tracks correctly.
One thing I ran into was the DMP FIFO backing up. I had to drain it completely each loop with a while loop, otherwise the data would pile up and the readings got delayed. I also had to make sure current_yaw resets to 0 when starting the PID so the setpoint is always relative to where the robot is facing at that moment.
Derivative Term
The lab asks if it makes sense to take the derivative of a signal that’s already the integral of another. It does. The raw gyroscope reading (gyrZ) literally is angular velocity, which is the derivative of yaw. So instead of differentiating the DMP yaw (noisy, susceptible to derivative kick), I just use the gyro directly for the D-term.
I put a low-pass filter on gyrZ (alpha=0.1) to smooth out noise.
PD Controller
I went with PD. Proportional handles the main rotation and derivative damps oscillation so it doesn’t overshoot.
int compute_yaw_pid(float gyrZ_raw) {
float error = yaw_setpoint - current_yaw;
while (error > 180.0) error -= 360.0;
while (error < -180.0) error += 360.0;
yaw_filtered_gyrZ = 0.1 * gyrZ_raw + 0.9 * yaw_filtered_gyrZ;
float output = yaw_kp * error + yaw_kd * (-yaw_filtered_gyrZ);
int motor_cmd = constrain((int)output, -150, 150);
if (motor_cmd > 0 && motor_cmd < 70) motor_cmd = 70;
if (motor_cmd < 0 && motor_cmd > -70) motor_cmd = -70;
if (abs(error) < 5.0) motor_cmd = 0;
return motor_cmd;
}
The deadband bump to 70 PWM is the minimum to actually spin the wheels. My battery was dying out so had to amp up the 70PWM :). Within 5 degrees of the setpoint I kill the motors and let friction hold position.
I also bypassed the straight-line drive() function and used direct analogWrite with a separate yaw calibration factor. Had to do this, because the calibration was a bit funky when rotating left and right.
Tuning
I started P-only and added D:
| Kp | Kd | Result |
|---|---|---|
| 3.0 | 0.0 | Reaches 90 degrees, jitters at setpoint |
| 3.0 | 0.1 | Less jitter, slight overshoot |
| 3.0 | 1.0 | Smooth approach, settles within 5 degrees |
Range and Sampling
The DMP outputs at about 56 Hz. I initially logged every loop iteration (~1250 Hz) which burned through my array in under a second with 89% duplicate samples. Fixed by only logging when new DMP data arrives.
The gyroscope default range is ±250 dps, plenty since the robot doesn’t spin faster than maybe 100 dps.
Results
Final gains: Kp=3.0, Kd=1.0, dead zone=5 degrees, deadband=70 PWM, max PWM=150.
90 Degree Step Response
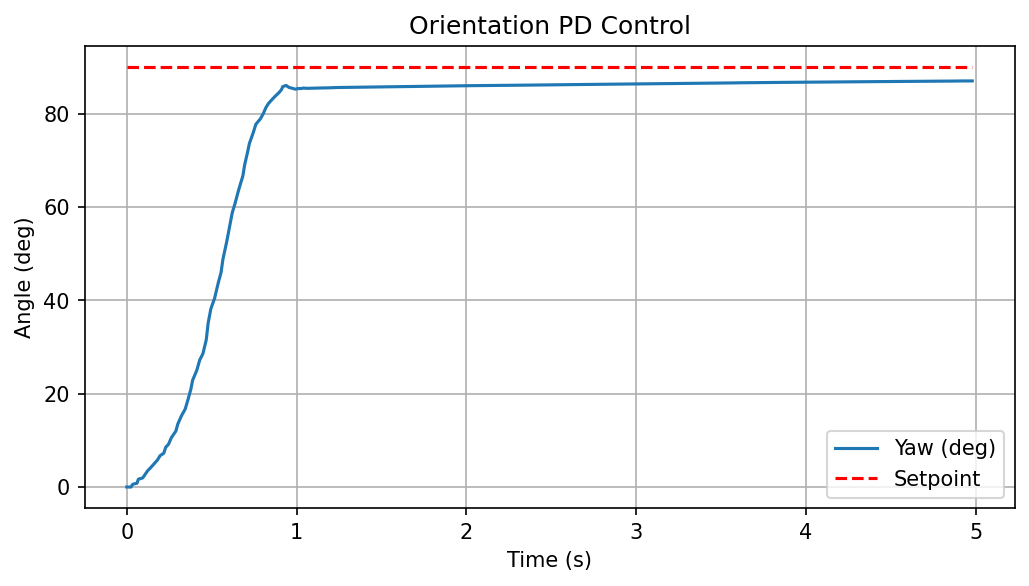
Yaw angle vs time for 90 degree setpoint. Settles within 5 degrees in about 0.9s.
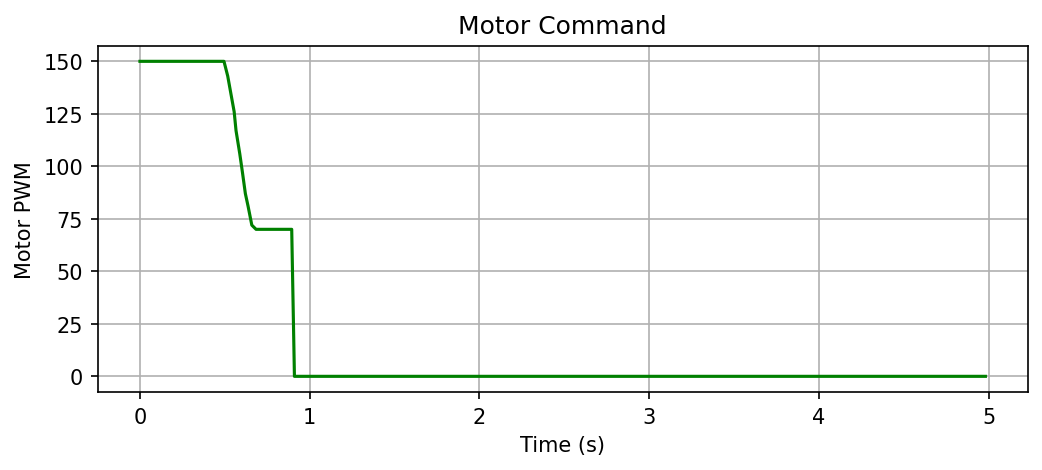
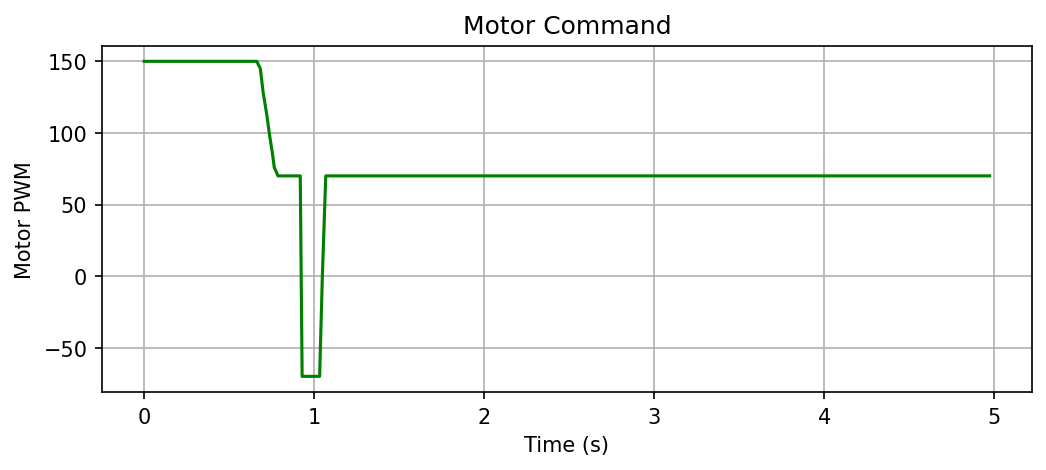
Motor command for 90 degree trial. Starts at max PWM, drops through deadband, then cuts to 0 inside the dead zone.
Open video if it doesn't play above.
180 Degree Step Response
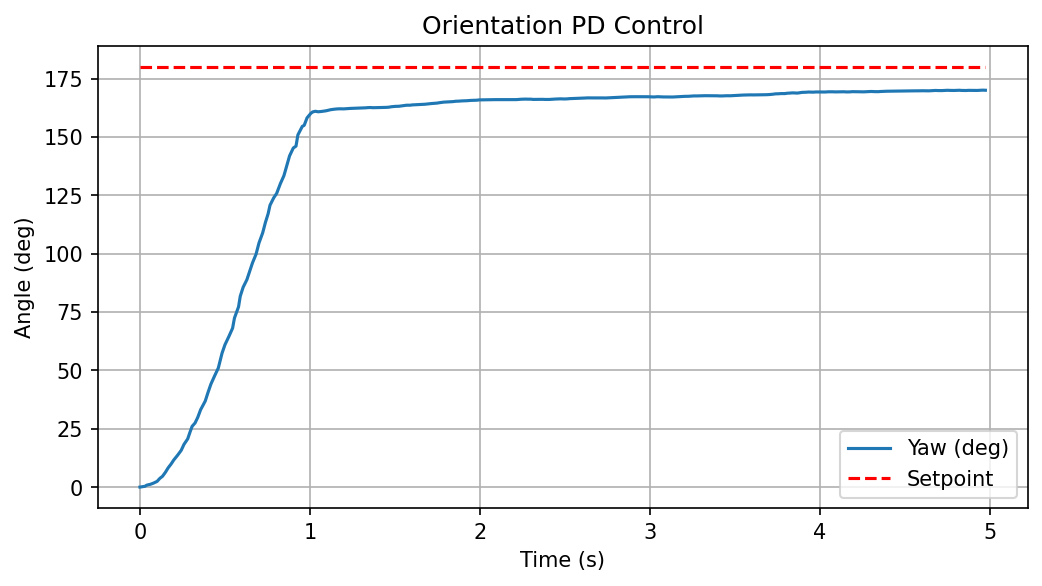
Yaw angle vs time for 180 degree setpoint. Reaches about 165 degrees with about 15 degree steady-state offset.
Motor command for 180 degree trial. Briefly reverses when it overshoots, then holds at deadband trying to close the remaining gap.
Kick / Disturbance Test
Open video if it doesn't play above.